Description
The RFLIB library makes sending and receiving radio messages easier. Sending and receiving messages through a JemRF radio is easily achieved by reading and writing to the serial port (see this example) but this library has some more advanced features that you may need:
-
Multiprocessing on an Arduino is inherently difficult due to its single processor. Therefore monitoring the serial port for incoming messages as well as carrying out other tasks (e.g. switch a light on/off) can become difficult. This library implements a non-blocking, also sometimes called “round-robin”, technique to ensure you never miss an in-coming radio message and can also do other processing.
-
Messaging Receipt Reliability messaging will retransmit messages not received by the intended recipient, and timeout after some predefined amount of retry attempts. This is useful for time when you want to ensure your messages are being received and take some action if they are not received.
-
Serial Port Abstraction hides the technicality of opening closing, reading and writing to the serial port. This library has a simple transmit method you can use to transmit radio messages and a callback function that is called when a message is received.
-
Call back function for messages received The library automatically monitors the serial port for messages and calls a call-back function in your code whenever a message is received.
-
Debug your code using the debug feature that will output debug information to the serial monitor.
-
Duplicate filtering will filter duplicate messages received.
Example code
More examples can be found here : https://github.com/JemRF/rflib/tree/master/examples
/*
A simple example to receive radio messages and print them to the serial_port
This example uses the rflib library to receive RF messages
For use with radio modules from www.jemrf.com
*/
#include <rflib.h>
RFLIB rflib;
void myFunc() {
Serial.println("Got message...");
Serial.println(rflib.message_in);
}
void setup() {
Serial.begin(9600);
rflib.RegisterCallback(myFunc);
rflib.begin();
}
void loop() {
//Important to call profess_rf() frequently and have no delays in this loop
rflib.process_rf();
}
Installation
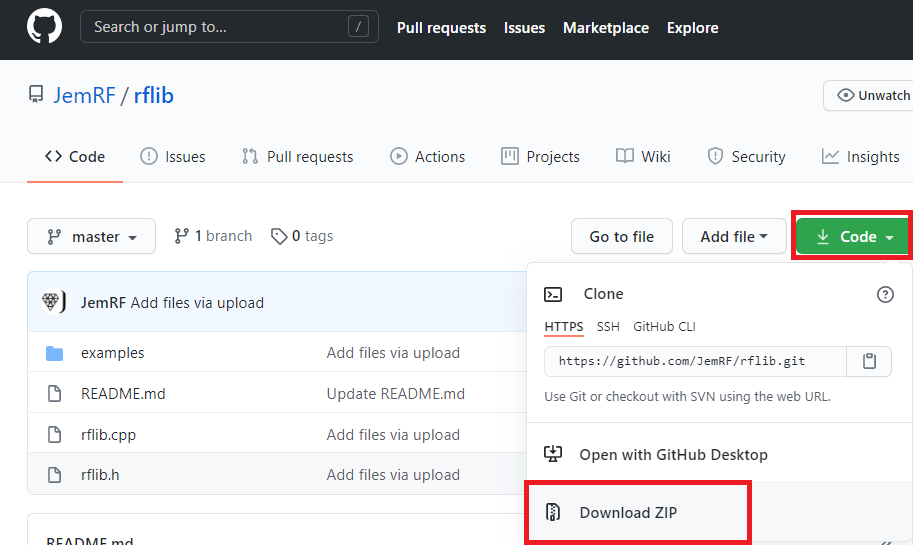
- Download the library from here: https://github.com/JemRF/rflib.git
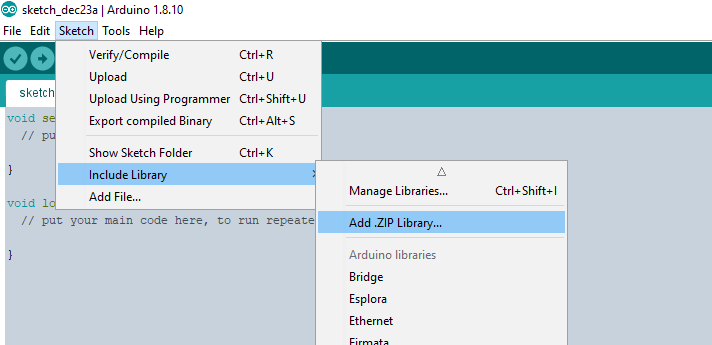
- Open up the Arduino IDE and click on Sketch->Include Library->Add .ZIP library and select the library downloaded in the previous step
- Close all instances of the Arduino IDE and restart the IDE
Methods
begin(void)
- Should be called once in the setup() routine
- Opens the software serial port and initializes variables
transmit(char * message, int retries)
Where:
- message - 12 character message that will be sent to the radio for transmission. The message should be in LLAP format.
- retries (Optional) - When set, the message will be transmitted retries times when an acknowledgment is not received from the destination node. If no acknowledgment is received after retires attempts then the got_ack property is set to false and timeout property set to false.
Returns: void (nothing)
Example:
rflib.transmit("a62RELAYA---",3);
process_rf(void)
- This method should be placed in the loop() function within your Arduino code. Do not put code that could slow down or block this routine from being executed, otherwise you may miss some in-coming radio messages. See Automation 1 for an example on how to write non-blocking code.
Returns: void (nothing)
RegisterCallback(InputEvent InEvent)
- This method registers a callback routine in the user application code that is called whenever a valid LLAP message is received (and put in rflib.message_in).
Where:
- InEvent - the name of the callback function in the user code.
Returns: void (nothing)
Example:
rflib.RegisterCallback(myFunc);
Also refer the code example above.
Properties
filter_duplicates
- When set to true duplicate messages are filtered away so the callback routine is only called once per unique message.
got_ack
- This is set to true when an acknowledgment is received from the destination node after calling the transmit method.
got_message
- This is set to true when a message is received and false when calling the transmit method.
message_in
- 12 character string containing a message that has been received.
message_out
- 12 character string containing a message that will be sent.
timeout
- Set to true if the number of retries has been exceeded.
Debugging
- Uncomment the line below to enable debug messages to be sent to the Arduino serial monitor. Make sure you have enabled the monitor in your code (see above example).
In rflib.h change:
//#define DEBUG
To:
#define DEBUG